
学会这篇,突破相机限制!
发布日期:2020-10-29 20:23:49
第一部分:生成相机参数文件
-
方法一:使用相机参数模板
-
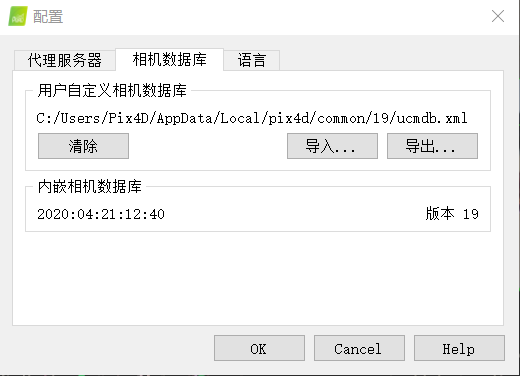
方法二:在Pix4Dmapper中生成相机参数文件
第一部分
生成相机参数文件
<cameraModelDB>
<version>19</version>
<cameras>
<cameraname="S.O.D.A._10.6_5472x3648">
<imageWidth>5472</imageWidth>
<imageHeight>3648</imageHeight>
<pixelSize>2.4</pixelSize>
<principalPointXmm>6.54</principalPointXmm>
<principalPointYmm>4.348008</principalPointYmm>
<lensType>perspective</lensType>
<focalLengthmm>10.633008</focalLengthmm>
<radialK1>0.033</radialK1>
<radialK2>-0.209</radialK2>
<radialK3>0.315</radialK3>
<tangentialT1>0</tangentialT1>
<tangentialT2>0</tangentialT2>
<bandConfig>
<band name="Red"centralWaveLength="660" width="0"/>
<bandname="Green" centralWaveLength="550"width="0"/>
<bandname="Blue" centralWaveLength="470"width="0"/>
</bandConfig>
</camera>
</cameras>
</cameraModelDB>
<cameraModelDB>
<version>19</version>
<cameras>
<cameraname="PHANTOMVISIONFC200_5.0_4384x3288">
<imageWidth>4384</imageWidth>
<imageHeight>3288</imageHeight>
<principalPointXmm>3.085</principalPointXmm>
<principalPointYmm>2.31375</principalPointYmm>
<lensType>fisheye</lensType>
<poly1>1</poly1>
<poly2>-0.00643155</poly2>
<poly3>-0.127019</poly3>
<poly4>-0.017398</poly4>
<c>3853</c>
<d>6.74</d>
<e>6.74</e>
<f>3853</f>
<bandConfig>
<band name="Red"centralWaveLength="660" width="0"/>
<band name="Green"centralWaveLength="550" width="0"/>
<band name="Blue"centralWaveLength="470" width="0"/>
</bandConfig>
</camera>
</cameras>
</cameraModelDB>
字段说明
标签 Camera,属性 name
字符串格式为:
<model>_<lens-model>_<focal-length>_<width>x<height>
这些信息可从影像的Exif中得到。
如Exif中未定义镜头型号 (即lens-model), 则字符串格式为: <model>_<width>x<height>
标签 imageWidth, imageHeight
影像的宽度/高度(以像素为单位)
标签 pixelSize
像素大小(以微米为单位)
标签 pixelSize
像素大小(以微米为单位)
标签 principalPointXmm, principalPointYmm
像主点X/Y(以毫米为单位)
标签 LensType
透视或鱼眼镜头
标签 focalLengthmm
焦距(以毫米为单位,仅透视镜头)
标签 radialK1, radialK2, radialK3, tangentialT1, tangentialT2
径向和切向畸变系数(仅透视镜头)
标签 poly1, ..., poly4
多项式系数(仅鱼眼镜头)
标签 c, d, e, f
仿射变换参数(仅鱼眼镜头)
标签 bandConfig
波段列表
标签 band,属性name
波段名称 (以下之一: “Red”, “Green”, “Blue”, “NIR”, “Alpha”, “Gray”, “Red edge”, “Thermal IR”, “LWIR”, “Garbage”, “Unknown”)
标签 band,属性centralWaveLength
某波段的中心波长(以纳米为单位)
标签 band,属性width
带宽(以纳米为单位;如果未指定,则为0)
校准步骤
1. 新建工程,导入影像,控制点等信息。

3. 运行“1.初始化处理”。
4. (可选)如果有地面控制点,进行刺点,刺点完成后运行“重新优化”。
• 在空三射线编辑器中,验证地面控制点在原始影像中的重投影。
6. 如果建模质量不够好,请添加一些手工连接点。
• 最后点击窗口上方的保存。
8. 删除手工连接点(如有),重新运行“1.初始化处理”。
9. 评估建模质量(方法如前)。
第二部分
从Pix4Dreact中导入相机参数文件

△ 在Pix4Dreact中导入相机参数文件

